烟台理工学院:《机器人操作系统(ROS)》课程教学资源(课件讲稿)绪论、第1章 极限与配合及检测
机器人操作系统(ROS)
机器人操作系统(ROS)

第1章绪论 学习及技能目标 图中,零件的尺寸Φ50.8288015等表示的含义分别是什么? 它们的公称尺寸、极限尺寸、极限偏差、公差分别是多少? I I 0 I I 15-0.018 +0.015 x80 I I I I I I I I I 1700-0 I 1200 52oo Otp 8200- I I I I I I I I I 40±0.012 零件图样
第1章 绪 论 学习及技能目标 图中,零件的尺寸Φ50 、8 等表示的含义分别是什么? 它们的公称尺寸、极限尺寸、极限偏差、公差分别是多少? 0 -0.025 +0.015 0 零件图样
第1章极限与配合及检测 学习目标 通过本章的学习,学生应掌握以下知识及技能: 1·理解有关公差、极限偏差等术语的定义及有关计算,并 会查表标注尺寸的极限偏差值。 2.理解配合制的概念及公差等级的选用、配合类型的选择 3.掌握零件检测(测量方法、测量误差、测量精度等)的 基础知识。 4.能正确使用游标卡尺、外径千分尺等测量工具对典型零 、件进行测量
第1章 极限与配合及检测 学习目标 通过本章的学习,学生应掌握以下知识及技能: 1.理解有关公差、极限偏差等术语的定义及有关计算,并 会查表标注尺寸的极限偏差值。 2.理解配合制的概念及公差等级的选用、配合类型的选择。 3.掌握零件检测(测量方法、测量误差、测量精度等)的 基础知识。 4.能正确使用游标卡尺、外径千分尺等测量工具对典型零 件进行测量
第1章绪论 11什么叫机器人 12机器人系统的构成 1.3 机器人研发的原则 技能训练 8
第1章 绪 论 1.1 什么叫机器人 1.2 机器人系统的构成 1.3 机器人研发的原则 技能训练

课程介绍 为什么要学习ROS ROS:Robot Operating System,机器人操作系统 通信机制 开发工具 应用功能 生态系练 https://robonaut.jsc.nasa.gov/r2/ 8
课程介绍 为什么要学习ROS https://robonaut.jsc.nasa.gov/r2/
课程介绍 为什么要学习R0S 13.AM 到n时 林n球保 这方时m 4 12l A 40 8.4 4理信 4拼许 维 ATaN 。l78 K monthly users* Global impact:USA constitutes e3巧%anual increase 3.M 19%of users" 。l.49 M annual users'* 33期 Partial translations in 14 languages 24.48M annual page views++* 16N 290k 560M Fuerte回 Ee审 Groovy y indigo ne 0e201日 2012 2013 2014 2015 2016 2017 ●65e065 出ROS ●Fieid tobo 327K monthly downloaders** ●5 pace Ro5 Autonomous Underwater Vehicle 162M monthly binary packages ●Humanoid Rob6 m050石 downloaded. ●Automotive o打annual t口e .59TB monthly download traffic+ ROS社区内的功能包数量、下载量、wk访问量、相关文章均呈大幅度上涨 (来源:R0SCon2017、2018)
课程介绍 为什么要学习ROS

课程介绍 为什么要学习ROS Moloman Universal Robots Keve Jco AB电的想2400 KCseada Had Robatn演发atot 何护4 Poneer F3A相 A58A1D5A90 RR0防 日0lAa日 shgr焦D6 Audebaran NAO Cant-O-Bot Comad 15 Faouc itoa UALR义B阿 Scnun Deattous Hand Aicbaran Romeo Denso Robat fv060 CUKA OmniRO日 Cyton wta TUM Rosie Rot Eork b Norus Homemate Rooot Powering the world`srobots-一机器人领域的普遍标准 (来源:http/robots.ro5.orE/)
课程介绍 为什么要学习ROS
课程介绍 为什么要学习ROS I did it! Did I do that? No idea,what I am doing. But I keep Now I get it! This actually doing it. makes sense. Looks Or not... like fun This is I don't know s! hard! Time 8
课程介绍 为什么要学习ROS

课程介绍 这门课讲什么? 基础概述 核心概念 编程基础 常用组件 进阶展望 8
课程介绍 这门课讲什么?
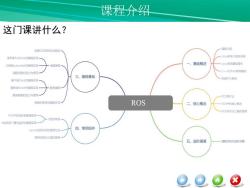
课程介绍 这门课讲什么? 健工作空间与城包 家程介超 发布者ublisherf的程实现 一山nL系统介铝及安装 切阅磨Sub0e的编理买现 话题滨程 一、基础概述 山ru系统基计模作 话题消息的定义与使用 C,+Py叶cn极局基础 三、编程基础 客户0ent的程实现 安装R0S系统 颗务Seer修编程实现 服务编程 服务橱的定义与使用一 ROS是什么 参数的徒用与篇程方法 ROS 二、核心概念 R0S中的核心照念 ROS命令行工具的使用 RS中的坐标系营理系 坐标系统 坐标系广福与监听诊编程实现一 aUnc小自动文件的使用方法 四、常用组件 常用可视化工具的使用 五、进阶展望 评程总结与进阶攻路 8
课程介绍 这门课讲什么?
按次数下载不扣除下载券;
注册用户24小时内重复下载只扣除一次;
顺序:VIP每日次数-->可用次数-->下载券;
- 烟台理工学院:《机器人学》课程教学资源(课件讲稿)第六章 机器人的动力学.pdf
- 烟台理工学院:《机器人学》课程教学资源(课件讲稿)第五章 速度和静态力.pdf
- 烟台理工学院:《机器人学》课程教学资源(课件讲稿)第九章 机器人的线性控制.pdf
- 烟台理工学院:《机器人学》课程教学资源(教学大纲)智能机器人技术理论课教学大纲 Intelligent Robot Technology.doc
- 烟台理工学院:《机器人学》课程教学资源(教学大纲)机器人工程专业导论理论课教学大纲 Introduction to robot engineering.doc
- 烟台理工学院:《机器人学》课程教学资源(教学大纲)竞赛机器人综合实训教学大纲 Comprehensive training of competition robot.doc
- 烟台理工学院:《机器人学》课程教学资源(教学大纲)机器人组装与调试实习教学大纲 Robot assembly and debugging practice.doc
- 烟台理工学院:《机器人学》课程教学资源(教学大纲)理论课教学大纲 Robotics.doc
- 烟台理工学院:《机器人学》课程教学资源(教学大纲)工业机器人教学大纲 Industrial robot.doc
- 烟台理工学院:《机器人学》课程教学资源(教学大纲)机器人建模与仿真教学大纲 Robot Modeling and Simulation.doc
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第一章 控制系统导论.pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第三章 线性系统的时域分析法(3.5-3.6).pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第二章 控制系统的数学模型.pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第二章 控制系统的数学模型(拉氏变换).pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第三章 线性系统的时域分析法(3.1-3.4).pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第四章 线性系统的根轨迹法.pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第五章 线性系统的频域分析法(频率法,5.1-5.2).pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第五章 线性系统的频域分析法(频率法)5.3 频域稳定判据.pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第五章 线性系统的频域分析法(频率法,5.4-5.5).pdf
- 烟台理工学院:《自动控制原理 Automatic Control Theory》课程教学资源(课件讲稿)第六章 线性系统的校正方法.pdf
- 烟台理工学院:《机器人学》课程教学资源(课件讲稿)第一章 机器人概述(主讲:杨智勇).pdf
- 烟台理工学院:《机器人学》课程教学资源(课件讲稿)第三章 机器人的顺向运动学.pdf
- 烟台理工学院:《机器人学》课程教学资源(课件讲稿)第二章 空间描述和变换.pdf
- 烟台理工学院:《机器人学》课程教学资源(课件讲稿)第四章 机器人的逆向运动学.pdf
- 华东理工大学:《信号与系统》课程教学资源(学习指导书)第一章 信号与系统概述.pdf
- 华东理工大学:《信号与系统》课程教学资源(学习指导书)第二章 线性时不变系统的时域分析.pdf
- 华东理工大学:《信号与系统》课程教学资源(学习指导书)第三章 傅里叶变换(连续时间信号的傅里叶分析).pdf
- 华东理工大学:《信号与系统》课程教学资源(学习指导书)第四章 傅里叶变换在系统分析中的应用.pdf
- 华东理工大学:《信号与系统》课程教学资源(学习指导书)第五章 连续时间系统的复频域分析.pdf
- 华东理工大学:《信号与系统》课程教学资源(试卷习题)模拟试题(含参考答案).pdf
- 华东理工大学:《信号与系统》课程教学资源(试卷习题)各章习题(含解答).pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)绪论 Signals and Systems(任课教师:朱煜).pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)常见基本信号、奇异信号 Singularity signals.pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)第一章 信号与系统概述.pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)信号的分解.pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)第二章 连续时间系统的时域分析方法.pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)第三章 傅里叶变换 3.1 Frequency analysis of periodic signals(FS).pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)第三章 傅里叶变换 §3.2 非周期信号的傅立叶变换.pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)第三章 傅里叶变换 §3.4 常用非周期信号的频谱.pdf
- 华东理工大学:《信号与系统》课程教学资源(课件讲稿)第三章 傅里叶变换 §3.5 傅里叶变换的性质 Properties of Fourier Transform.pdf