《普通物理学》课程教学资源(PPT课件)第三章 刚体和流体的运动 3-2 力矩、转动惯量、定轴转动定律
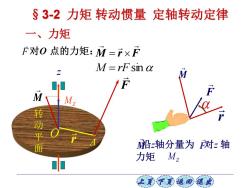
§3-2力矩转动惯量定轴转动定律 一、力矩 F对0点的力矩:M=干×F M=rFsin a 0 M Mz 转动平面 沿z轴分量为对z轴 力矩M2 让美下觉返同速
上页 下页 返回 退出 z O 转 动 平 面 r A F M r F M Z M 沿z轴分量为 对z 轴 力矩 MZ F M M = rF sin M r F F 对O 点的力矩: = 一、力矩 §3-2 力矩 转动惯量 定轴转动定律
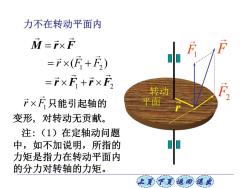
力不在转动平面内 M=TxF =F×(匠+E) =r×F+r×F, 转动 产×F只能引起轴的 平面 变形,对转动无贡献。 注:(1)在定轴动问题 中,如不加说明,所指的 力矩是指力在转动平面内 的分力对转轴的力矩。 上美不意通可退欢
上页 下页 返回 退出 力不在转动平面内 注:(1)在定轴动问题 中,如不加说明,所指的 力矩是指力在转动平面内 的分力对转轴的力矩。 M r F = 只能引起轴的 变形, 对转动无贡献。 1 r F 转动 平面 F1 F F2 1 2 = + r F F ( ) 1 F2 r F r = + r
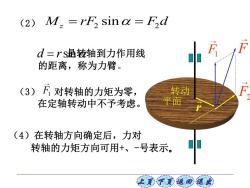
(2)M.=rF,sina=F,d d=rS转轴到力作用线 的距离,称为力臂。 (3)F对转轴的力矩为零, 转动 在定轴转动中不予考虑。 平面 (4)在转轴方向确定后,力对 转轴的力矩方向可用+、-号表示。 让意文滋可退攻
上页 下页 返回 退出 是转轴到力作用线 的距离,称为力臂。 d = rsin 2 2 (2) M rF F d z = = sin (3) F1 对转轴的力矩为零, 在定轴转动中不予考虑。 (4)在转轴方向确定后,力对 转轴的力矩方向可用+、-号表示。 转动 平面 F1 F F2 r
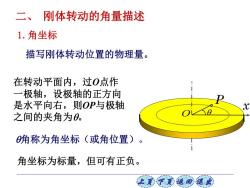
二、 刚体转动的角量描述 1.角坐标 描写刚体转动位置的物理量。 在转动平面内,过O点作 一极轴,设极轴的正方向 是水平向右,则OP与极轴 之间的夹角为0。 角称为角坐标(或角位置)。 角坐标为标量,但可有正负。 让贰子家通可退此
上页 下页 返回 退出 O 描写刚体转动位置的物理量。 P x 在转动平面内,过O点作 一极轴,设极轴的正方向 是水平向右,则OP与极轴 之间的夹角为。 角称为角坐标(或角位置)。 角坐标为标量,但可有正负。 二、 刚体转动的角量描述 1.角坐标

2.角位移 描写刚体位置变化的物理量。 角坐标的增量:△0=0-0 V2 D 称为刚体的角位移 3.角速度 描写刚体转动快慢和方 向的物理量。 角速度o=lim de △t->0 △t dt 方向:满足右手定则,四指沿刚体转动方向右旋,大 拇指指向。 让美下觉返同速
上页 下页 返回 退出 描写刚体位置变化的物理量。 角坐标的增量: =− 称为刚体的角位移 p P 2 v 1 v r 描写刚体转动快慢和方 向的物理量。 t t = → 0 lim d dt 角速度 = 方向:满足右手定则,四指沿刚体转动方向右旋,大 拇指指向。 2.角位移 3.角速度 x y O
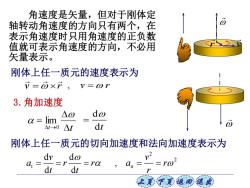
角速度是矢量,但对于刚体定 轴转动角速度的方向只有两个,在 表示角速度时只用角速度的正负数 值就可表示角速度的方向,不必用 矢量表示。 刚体上任一质元的速度表示为 V=而×F,V=ωr 3.角加速度 △⊙ d a lim △t-→0△t dt 刚体上任一质元的切向加速度和法向加速度表示为 dy do a -=r0, dt dt an=-=ro2
上页 下页 返回 退出 角速度是矢量,但对于刚体定 轴转动角速度的方向只有两个,在 表示角速度时只用角速度的正负数 值就可表示角速度的方向,不必用 矢量表示。 刚体上任一质元的速度表示为 v r = v r t t = → 0 lim d dt = , v = r t d d d d v a r r t t = = = 刚体上任一质元的切向加速度和法向加速度表示为 2 2 n , v a r r = = 3.角加速度
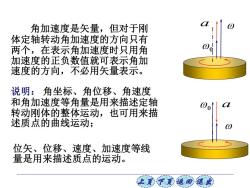
角加速度是矢量,但对于刚 体定轴转动角加速度的方向只有 两个,在表示角加速度时只用角 加速度的正负数值就可表示角加 速度的方向,不必用矢量表示。 说明:角坐标、角位移、角速度 和角加速度等角量是用来描述定轴 转动刚体的整体运动,也可用来描 述质点的曲线运动; 位矢、位移、速度、加速度等线 量是用来描述质点的运动。 让美子觉返同速
上页 下页 返回 退出 a 0 0 a 角加速度是矢量,但对于刚 体定轴转动角加速度的方向只有 两个,在表示角加速度时只用角 加速度的正负数值就可表示角加 速度的方向,不必用矢量表示。 说明: 角坐标、角位移、角速度 和角加速度等角量是用来描述定轴 转动刚体的整体运动,也可用来描 述质点的曲线运动; 位矢、位移、速度、加速度等线 量是用来描述质点的运动
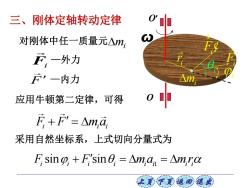
三、刚体定轴转动定律 对刚体中任一质量元△m 云一外力 云,一内力 应用牛顿第二定律,可得 E+F'=△m,a, 采用自然坐标系,上式切向分量式为 F;sing,+E'sin8,=△m,a.=△m,o 让贰不觉返回退
上页 下页 返回 退出 应用牛顿第二定律,可得 ω O Fi Fi ¢ r i i mi i r 对刚体中任一质量元 mi Fi —外力 F —内力 F F m a i i i + = 采用自然坐标系,上式切向分量式为 t sin sin F F m a m r i i i i i i i i + = = 三、刚体定轴转动定律 O′

用乃乘以上式左右两端: F5sinp,+Fsin0=△m,a 设刚体由N个点构成,对每个质点可写出上述类 似方程,将N个方程左右相加,得 sing+2FP:sm8=立(ama i-1 i 根据内力性质(每一对内力等值、反向、共 线,对同一轴力矩之代数和为零),得 ∑F%sine=0 i 让美觉返司退
上页 下页 返回 退出 用 ri 乘以上式左右两端: 2 sin sin Fr Fr m r i i i i i i i i + = 设刚体由N个点构成,对每个质点可写出上述类 似方程,将N个方程左右相加,得 2 1 1 1 sin sin ( ) N N N i i i i i i i i i i Fr F r m r = = = + = 根据内力性质(每一对内力等值、反向、共 线,对同一轴力矩之代数和为零),得 1 sin 0 N i i i F r = =

得到 ∑Fg;sing=∑(Ama i=1 上式左端为刚体所受外力的合外力矩,以M表 示;右端求和符号内的量与转动状态无关,称为刚 体转动惯量,以J表示。于是得到 do M=Ja=J 刚体定轴 dt 转动定律 让无子文返回退此
上页 下页 返回 退出 刚体定轴 转动定律 2 1 1 sin ( ) N N i i i i i i i Fr m r = = 得到 = 上式左端为刚体所受外力的合外力矩,以M 表 示;右端求和符号内的量与转动状态无关,称为刚 体转动惯量,以J表示。于是得到 d d M J J t = = 刚体定轴 转动定律
按次数下载不扣除下载券;
注册用户24小时内重复下载只扣除一次;
顺序:VIP每日次数-->可用次数-->下载券;
- 《普通物理学》课程教学资源(PPT课件)第三章 刚体和流体的运动 3-1 刚体模型及其运动.ppt
- 《普通物理学》课程教学资源(PPT课件)第三章 刚体和流体的运动 3-0 教学基本要求.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-8 对称性和守恒定律.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-7 质点的角动量和角动量守恒定律.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-6 碰撞.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-5 质点系的功能原理、机械能守恒定律.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-4 保守力、成对力的功、势能.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-3 功、动能、动能定理.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-2 动量定理、动量守恒定律.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-1 质点系的内力和外力、质心、质心运动定理.ppt
- 《普通物理学》课程教学资源(PPT课件)第二章 运动的守恒量和守恒定律 §2-0 教学基本要求.ppt
- 《普通物理学》课程教学资源(PPT课件)第一章 力和运动 §1-5 伽利略相对性原理、非惯性系、惯性力.ppt
- 《普通物理学》课程教学资源(PPT课件)第一章 力和运动 §1-4 牛顿运动定律.ppt
- 《普通物理学》课程教学资源(PPT课件)第一章 力和运动 §1-3 相对运动、常见力和基本力.ppt
- 《普通物理学》课程教学资源(PPT课件)第一章 力和运动 §1-2 圆周运动和一般曲线运动.ppt
- 《普通物理学》课程教学资源(PPT课件)第一章 力和运动 §1-1 质点运动的描述.ppt
- 《普通物理学》课程教学资源(PPT课件)第一章 力和运动 §1-0 教学基本要求.ppt
- 《普通物理学》课程教学资源(PPT讲稿)17 光学习题与解答.ppt
- 《普通物理学》课程教学资源(PPT讲稿)16 波动习题与解答.ppt
- 《普通物理学》课程教学资源(PPT讲稿)15 振动习题与解答.ppt
- 《普通物理学》课程教学资源(PPT课件)第三章 刚体和流体的运动 3-3 定轴转动中的功能关系.ppt
- 《普通物理学》课程教学资源(PPT课件)第三章 刚体和流体的运动 3-4 定轴转动刚体的角动量定理和角动量守恒定律.ppt
- 《普通物理学》课程教学资源(PPT课件)第三章 刚体和流体的运动 3-5 进动.ppt
- 《普通物理学》课程教学资源(PPT课件)第三章 刚体和流体的运动 3-6 理想流体模型、定常流动、伯努利方程.ppt
- 《普通物理学》课程教学资源(PPT课件)第三章 刚体和流体的运动 3-7 牛顿力学的内在随机性、混沌.ppt
- 《普通物理学》课程教学资源(PPT课件)第四章 相对论基础 4-0 教学基本要求.ppt
- 《普通物理学》课程教学资源(PPT课件)第四章 相对论基础 4-1 狭义相对论基本原理、洛伦兹变换.ppt
- 《普通物理学》课程教学资源(PPT课件)第四章 相对论基础 4-2 相对论速度变换.ppt
- 《普通物理学》课程教学资源(PPT课件)第四章 相对论基础 4-3 狭义相对论的时空观.ppt
- 《普通物理学》课程教学资源(PPT课件)第四章 相对论基础 4-4 狭义相对论动力学基础.ppt
- 《普通物理学》课程教学资源(PPT课件)第四章 相对论基础 4-5 广义相对论简介.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-0 教学基本要求.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-1 热运动的描述、理想气体模型和物态方程.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-2 分子热运动和统计规律.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-3 理想气体的压强和温度公式.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-4 能量均分定理、理想气体的内能.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-5 麦克斯韦速率分布律.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-6 麦克斯韦-玻耳兹曼能量分布律、重力场中粒子按高度的分布.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-7 分子碰撞和平均自由程.ppt
- 《普通物理学》课程教学资源(PPT课件)第五章 气体动理论 5-8 气体的输运现象.ppt